贾浩楠 发自 凹非寺量子位 报道 | 公众号 QbitAI
蔚来1个、小鹏2个、威马3个…智能汽车“军备竞赛”正在上演。
今年一年间,几个国内头部造车新势力先后推出带激光雷达的量产车,数量一个比一个多。

表面看好像行业内卷,硬件越堆越多,能力却是未知数。
但这其实是智能汽车、自动驾驶的两条路线之争。
得益于国内的基建、供应链优势,以激光雷达为标志的融合感知方案,第一次有了对垒特斯拉纯视觉路线的底气。
而数年如一日喷激光雷达的马斯克,在创业初期如果有国内新势力的条件,恐怕现在的特斯拉就是另一幅模样了。
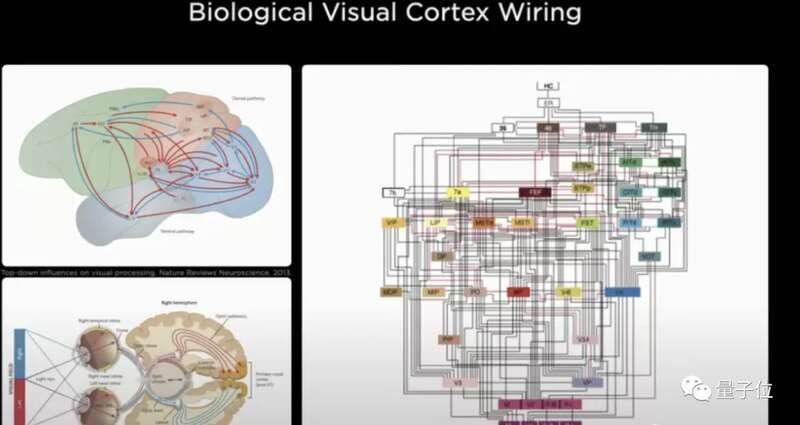
视觉,还是激光雷达?
2020年初,国产特斯拉Model 3上市,中国乘用车市场的竞争,迅速被拉到“智能”层面。
特斯拉的智能驾驶方案方案,视觉是绝对的主力,8个摄像头覆盖360°视野。
汽车对目标的感知、以及选择行驶策略的根据,主要依靠摄像头捕捉的图像数据,能力高低,全凭算法决定。
但从自动驾驶技术发展来看,早期大部分厂家的测试车辆,无一不背着一个“小花盆”:

这就是Lidar,中文翻译过来就是激光雷达。
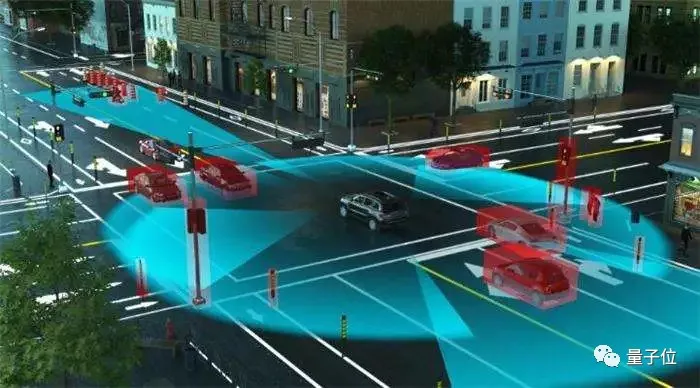
它代表了另一条技术路线:融合感知。
行驶决策的依据,不只依赖摄像头,而是综合考虑激光雷达的点云图、视频图像等等数据。
不同传感器之间的数据在算法层面进行融合互补。
算法对于图像,可能出现目标漏检误检,这时就能通过雷达回波的点云图“兜底”。
但是,这样多冗余的方案,却被马斯克嗤之以鼻。
马斯克认为,既然人类能仅凭两只眼睛开车,那么AI也一定能。所以特斯拉的追求,就是打造一个与人类别无二致的“AI司机”。
采取多传感器方案的,都是算法能力不足的体现,“血统”不纯。
为此,特斯拉的算法、开发平台都围绕图像数据建立,甚至不惜自研芯片、自建超算来打磨算法。
客观的说,视频图像在数据层面,的确已经包括了驾驶所需的一切信息,但在算法层面,能不能准确感知识别,却是一个大问题。
去年6月,国内一辆Model 3在开启Autopilot情况下,车辆完全没识别出路上已经出事故侧翻的白色货车,一头怼了上去:

这次所幸无人伤亡,但类似Autopilot这样以视觉为主的智能驾驶方案导致严重后果的的,也不在少数。
摄像头肯定看到了,但是算法却没能识别。
视觉方案的缺陷也在于此:恶劣天气、复杂路况,道路上非常规的异形物对系统影响太大。
且以超大数据“暴力”迭代算法,永远不能覆盖现实场景中所有异型车、障碍,在中国复杂路情况下尤其如此。
系统失效的风险永远存在。
所以,要在中国落地真正让用户敢用、愿意用的智能驾驶产品,感知识别是必须补的科目。
军备竞赛,为什么从激光雷达开始
对于自动驾驶来说,激光雷达是个老朋友了。
Waymo、百度,以及后来一众创业公司,都在用。
激光雷达能做什么?
其实就是像周围环境发射激光束,然后从回波信号来计算目标信息,比如距离、方位、高度、速度、姿态、甚至形状等参数。
激光束遇到目标一定会产生回波,信号也一定能被系统接收,这就与图像目标可能的漏检错检形成本质差别。
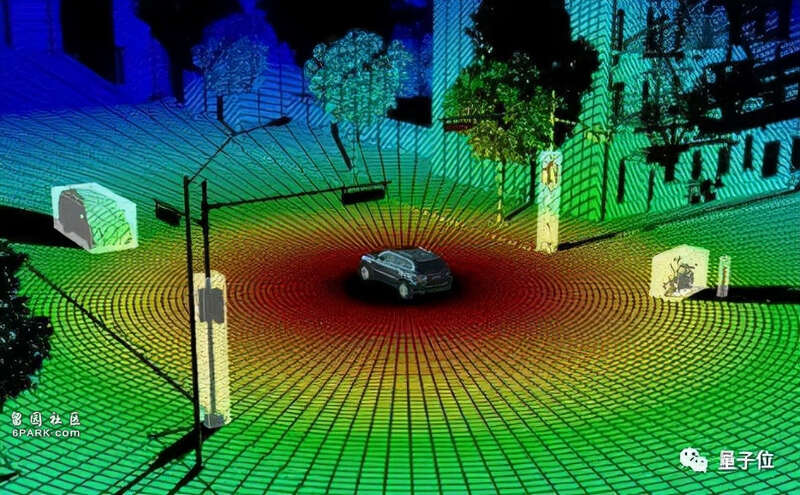
至少从感知层消除了算法能力不足的隐患。
既然这么好,为什么之前的量产车上见不到?
原因就一个:太贵了。
还在5、6年前,全球能提供量产激光雷达的只有美国Velodyne一家,素有“一线一万块”名声,而且产能堪忧,无法大量供给客户。
百度在2015年喊出自动驾驶3年量产5年商用的时候,计算的就是激光雷达的成本。,它的逻辑前提是激光雷达会从10万美元降低到500美元……

一般车用入门版64线激光雷达,上一个就是近70万成本。
所以测试车一辆一二百万很常见。
但这样的价格,作为大众消费品是不现实的。
马斯克既是技术极客,也是一个精明的商人,他当然清楚百万豪车卖不上量。
销量上不去数据就不够,算法就没法快速迭代。
与其如此,不如干脆放弃激光雷达,就走纯视觉路线,让广大车主义务贡献路测数据,出了意外还能以一句“用户使用不当”回应。
但激光雷达的成本下降,短期内有过被高估,但长期来讲又大大被低估了。
华为、大疆、速腾、禾赛等等企业,利用国内得天独厚的供应链优势和市场规模效应,把激光雷达的成本迅速降到数千至万元级别。
而且国内厂商后发先至,直接拿出第二代固态激光雷达,不但单个性能能等效过去上百线的机械式激光雷达,造型上也摆脱花盆,装车更加美观。

这个速度,是几年前谁都没料到的,直接导致Velodyne的业务在国内迅速收缩,裁撤了中国办公室,只保留代理。
所以最后的“东风”到位,想要在智能汽车浪潮中走的更稳更远的厂家,自然开始在激光雷达上你追我赶。
融合感知方案,现在走到哪一步了?
2021年面世、配了激光雷达的量产车有小鹏P5、北汽极狐αS,各两个。
2022年即将上市的新车中,蔚来ET7搭载一个、智己L7搭载两个,威马新车最多,用了三个。
数量最多的威马M7,不妨以此为例,看看激光雷达能带来什么改变。
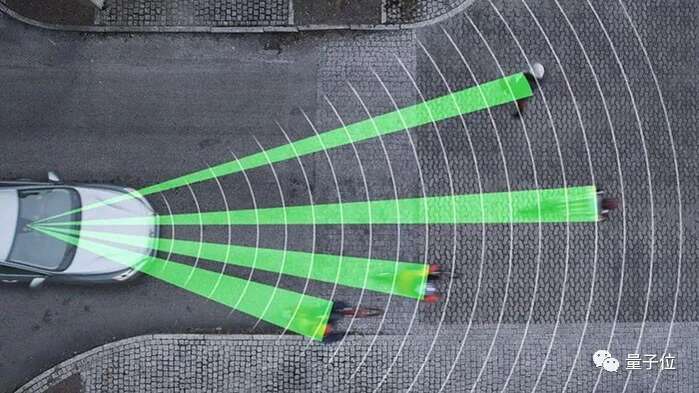
3颗激光雷达,车顶隆起部分的那一颗负责前向。

车身前两侧各一个,负责环视。

3颗激光雷达配合,总共能覆盖车身周围330°范围.
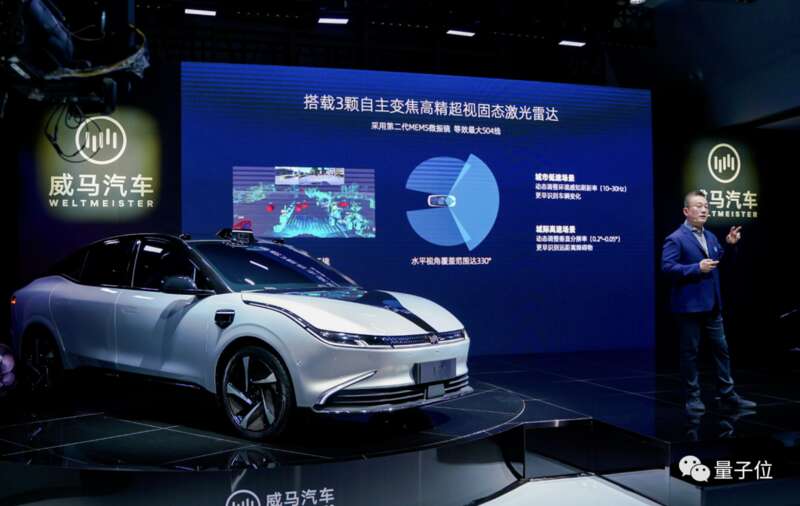
三科激光雷达都是自主品牌第二代固态激光雷达,MEMS光学微振镜,可以等效最大504线的传统机械式激光雷达。
具有自主变焦特性,根据不同的场景(城市低速、高速环路),对环境感知侧重点不同,主动动态调节帧率和分辨率。
威马自研了相关算法,可以实现利用点云图实时构建车辆周围环境。
当然,激光雷达仍然是威马M7融合感知方案的一部分,除了它们,还有其他29个各类传感器。

包括7个800万像素高清摄像头,4个环视摄像头、12个超声波雷达、5个毫米波雷达、,以及1个定位模块。
车身360度全覆盖,威马官方这样介绍:这套智能驾驶系统能保证在各种复杂的环境、复杂的光线环境、复杂的地理环境以及复杂的气象条件下的全场景的感知能力。
至于具体有哪些功能,此次并未透露。不过,基础的L2级各类辅助基本不会缺席。
而与百度深度绑定的威马,在Apollo高阶自动驾驶能力上,也有首发优势。
比如之前W6车型首次实现L4级别功能的自主泊车,M7这款车型上大概率也能见到。
前面说到M7有7个800万像素摄像头,可想而知开机后每秒产生的图像数据量一定惊人的大。
所以在这款车上,还有1016TOPS的算力,是目前特斯拉FSD的7倍。

这样的算力来自英伟达的Orin-X自动驾驶芯片,7nm征程,一共4颗。
其中两颗现役,另外两个是为今后智能驾驶系统进化预留的算力空间。
另外威马车型采用百度Apollo智能驾驶技术,可以调用Apollo云端算力资源,理论上单车算力是没有上限的,所以在M7这款车上1016TOPS还只是个开始。
行业你追我赶上激光雷达,威马直接干到三个,把这场军备竞赛推向更高水平。
威马M7车型,其实代表了一条中国特色的智能驾驶路线。
威马看似“大力出奇迹”的方案,其实是对中国真实情况的洞察。

用户、政策、产业都强调安全,从技术角度出发,目前只有走多传感器冗余路线。三个激光雷达,兼顾正向和两个侧后方,至少在感知层最大程度避免漏检误检。
传感器多,数据就多,算力要求就大,于是云端成为必选项,而国内的5G基础设施优势,提供了方便。
这个路线诞生于安全,最终服务安全。
所以,开始于激光雷达的智能车军备竞赛,正是督促厂商技术进步、更加重视安全的客观力量,受益者当然就是用户了。
而智能车军备竞赛,还是要以能量产,能进军主流市场为前提。

国内供应链、产业、市场规模优势,则为国内新势力扫清了最后障碍。
3个激光雷达,是威马对中国场景和路况的洞察,而且威马背靠百度Apollo——中国对自动驾驶研发投入最早最大的公司,想必也是一番深思熟虑之后的结果。
至于作为车主和普通消费者如何看待这种“内卷”?

完全就是好事一桩。
车厂们越卷,安全冗余就越高,用户也越受益,智能驾驶也就越快走进普通人生活。
所以跟其他行业和领域的“反内卷”不同,在智能车领域,应该支持这种内卷,支持这种千方百计提供更安全、更好用户体验的趋势。
威马,打响内卷第一枪,是勇气,当然也是实力和底气。
— 完 —


